In this article, we’ll examine the new PowerScale A310 and A3100 hardware platforms that were released a couple of weeks back.
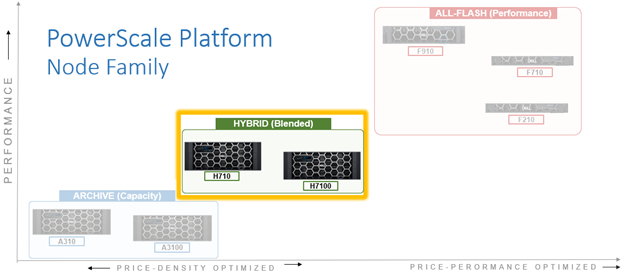
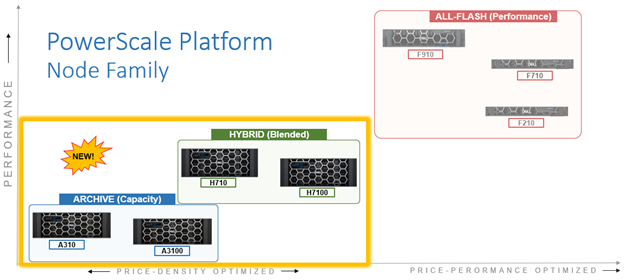
These A310 and A3100 comprise the latest generation of PowerScale A-series ‘archive’ platforms:
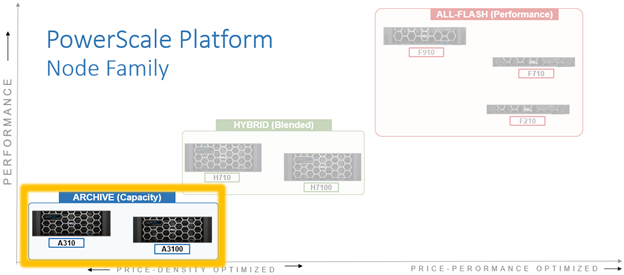
The PowerScale A-series systems are designed for cooler, infrequently accessed data use cases. These include active archive workflows for the A310, such as regulatory compliance data, medical imaging archives, financial records, and legal documents. And deep archive/cold storage for the A3100 platform, including surveillance video archives, backup, and DR repositories.
Representing the archive-tier, the A310 and A3100 both utilize a single-socket Zeon processor with 96GB of memory and fifteen (A310) or twenty hard drives per node respectively, plus SSDs for metadata/caching – and with four nodes residing within a 4RU chassis. From an initial 4 node (1 chassis) starting point, A310 and A31100 clusters can be easily and non-disruptively scaled two nodes at a time up to a maximum of 252 nodes (63 chassis) per cluster.
The A31x modular platform is based on Dell’s ‘Infinity’ chassis. Each node’s compute module contains a single 16-core Intel Sapphire Rapids CPU running at 1.8 GHz and with 22.5MB of cache, plus 96GB of DDR5 DRAM. Front-End networking options include 10/25 GbE and with both Ethernet or Infiniband as selectable options for the back-End network.
As such, the new A31x core hardware specifications are as follows:
| Hardware Class | PowerScale A-Series (Archive) | |
| Model | A310 | A3100 |
| OS version | Requires OneFS 9.11 or above.
Requires NFP 13.1 or greater. BIOS based on Dell’s PowerBIOS |
Requires OneFS 9.11 or above.
Requires NFP 13.1 or greater. BIOS based on Dell’s PowerBIOS |
| Platform | Four nodes per 4RU chassis; upgradeable per pair; node-compatible with prior gens. | Four nodes per 4RU chassis; upgradeable per pair; node-compatible with prior gens. |
| CPU | 8 Cores @ 1.8GHz, 22.5MB Cache | 8 Cores @ 1.8GHz, 22.5MB Cache |
| Memory | 96GB DDR5 DRAM | 96GB DDR5 DRAM |
| Journal | M.2: 480GB NVMe with 3-cell battery backup (BBU) | M.2: 480GB NVMe with 3-cell battery backup (BBU) |
| Depth | Standard 36.7 inch chassis | Deep 42.2 inch chassis |
| Cluster size | Max of 63 chassis (252 nodes) per cluster. | Max of 63 chassis (252 nodes) per cluster. |
| Storage Drives | 60 per chassis (15 per node) | 80 per chassis (20 per node) |
| HDD capacities | 2TB,4TB, 8TB, 12TBTB, 16TB, 20TB, 24TB | 12TBTB, 16TB, 20TB, 24TB |
| SSD (cache) capacities | 0.8TB, 1.6TB, 3.2TB, 7.68TB | 0.8TB, 1.6TB, 3.2TB, 7.68TB |
| Max raw capacity | 1.4PB per chassis | 1.9PB per chassis |
| Front-end network | 10/25 Gb Ethernet | 10/25 Gb Ethernet |
| Back-end network | Ethernet or Infiniband | Ethernet or Infiniband |
These node hardware attributes can be easily viewed from the OneFS CLI via the ‘isi_hw_status’ command. For example, from an A3100:
# isi_hw_status SerNo: CF2BC243400025 Config: H6R28 ChsSerN: ChsSlot: 1 FamCode: A ChsCode: 4U GenCode: 10 PrfCode: 3 Tier: 3 Class: storage Series: n/a Product: A3100-4U-Single-96GB-1x1GE-2x25GE SFP+-240TB-6554GB SSD HWGen: PSI Chassis: INFINITY (Infinity Chassis) CPU: GenuineIntel (1.80GHz, stepping 0x000806f8) PROC: Single-proc, Octa-core RAM: 103079215104 Bytes Mobo: INFINITYPIFANO (Custom EMC Motherboard) NVRam: INFINITY (Infinity Memory Journal) (4096MB card) (size 4294967296B) DskCtl: LSI3808 (LSI 3808 SAS Controller) (8 ports) DskExp: LSISAS35X36I (LSI SAS35x36 SAS Expander - Infinity) PwrSupl: Slot1-PS0 (type=ACBEL POLYTECH, fw=03.01) PwrSupl: Slot2-PS1 (type=ACBEL POLYTECH, fw=03.01) NetIF: bge0,lagg0,mce0,mce1,mce2,mce3 BEType: 25GigE FEType: 25GigE LCDver: IsiVFD2 (Isilon VFD V2) Midpln: NONE (No Midplane Support) Power Supplies OK Power Supply Slot1-PS0 good Power Supply Slot2-PS1 good CPU Operation (raw 0x882C0800) = Normal CPU Speed Limit = 100.00% Fan0_Speed = 12360.000 Fan1_Speed = 12000.000 Slot1-PS0_In_Voltage = 212.000 Slot2-PS1_In_Voltage = 209.000 SP_CMD_Vin = 12.100 CMOS_Voltage = 3.120 Slot1-PS0_Input_Power = 290.000 Slot2-PS1_Input_Power = 290.000 Pwr_Consumption = 590.000 SLIC0_Temp = na SLIC1_Temp = na DIMM_Bank0 = 42.000 DIMM_Bank1 = 40.000 CPU0_Temp = -43.000 SP_Temp0 = 40.000 MP_Temp0 = na MP_Temp1 = 29.000 Embed_IO_Temp0 = 51.000 Hottest_SAS_Drv = -45.000 Ambient_Temp = 29.000 Slot1-PS0_Temp0 = 47.000 Slot1-PS0_Temp1 = 40.000 Slot2-PS1_Temp0 = 47.000 Slot2-PS1_Temp1 = 40.000 Battery0_Temp = 38.000 Drive_IO0_Temp = 43.000
Also note that the A310 and A3100 are only available in a 96GB memory configuration.
On the front of each chassis is an LCD front panel control with back-lit buttons and 4 LED Light Bar Segments – 1 per Node. These LEDs typically display blue for normal operation or yellow to indicate a node fault. This LCD display is articulating, allowing it to be swung clear of the drive sleds for non-disruptive HDD replacement, etc.
The rear of the chassis houses the compute modules for each node, which contain CPU, memory, networking, cache SSDs, and power supplies. Specifically, an individual compute module contains a multi core Cascade Lake CPU, memory, M2 flash journal, up to two SSDs for L3 cache, six DIMM channels, front end 10/25 Gb ethernet, backend 40/100 or 10/25 Gb ethernet or Infiniband, an ethernet management interface, and power supply and cooling fans:
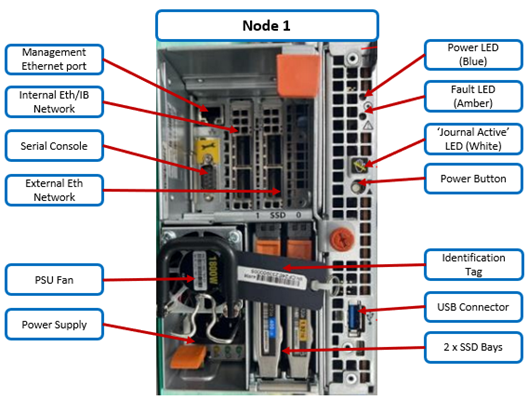
As shown above, the field replaceable components are indicated via colored ‘touchpoints’. Two touchpoint colors, orange and blue, indicate respectively which components are hot swappable versus replaceable via a node shutdown.
| Touchpoint | Detail |
| Blue | Cold (offline) field serviceable component |
| Orange | Hot (Online) field serviceable component |
The serviceable components within an PowerScale A310 or A3100 chassis are as follows:
| Component | Hot Swap | CRU | FRU |
| Drive sled | Yes | Yes | Yes |
| · Hard drives (HDDs) | Yes | Yes | Yes |
| Compute node | No | Yes | Yes |
| · Compute module | No | No | No |
| o M.2 journal flash | No | No | Yes |
| o CPU complex | No | No | No |
| o DIMMs | No | No | Yes |
| o Node fans | No | No | Yes |
| o NICs/HBAs | No | No | Yes |
| o HBA riser | No | No | Yes |
| o Battery backup unit (BBU) | No | No | Yes |
| o DIB | No | No | No |
| · Flash drives (SSDs) | Yes | Yes | Yes |
| · Power supply with fan | Yes | Yes | Yes |
| Front panel | Yes | No | Yes |
| Chassis | No | No | Yes |
| Rail kits | No | No | Yes |
| Mid-plane | Replace entire chassis | ||
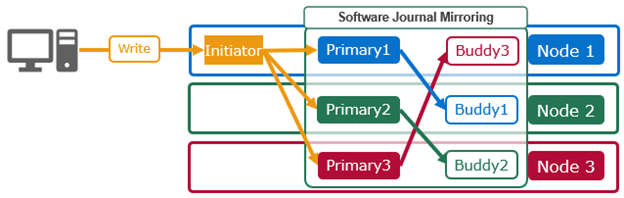
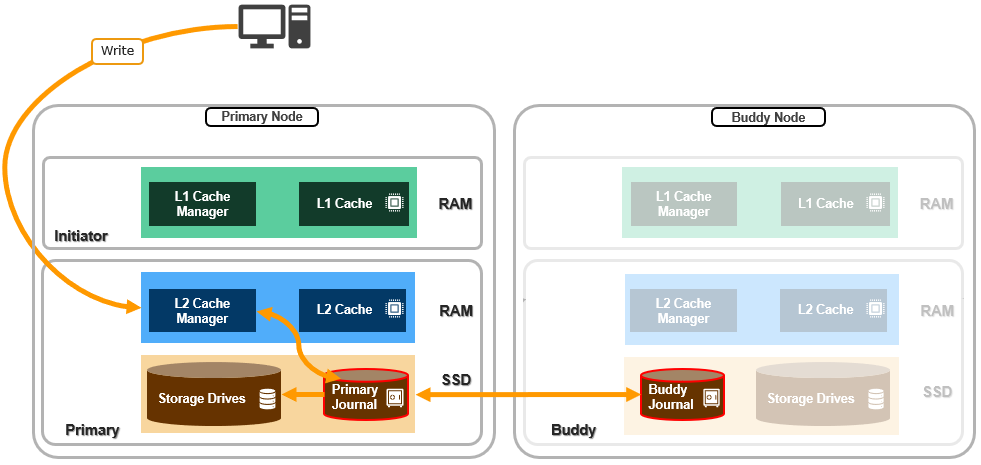
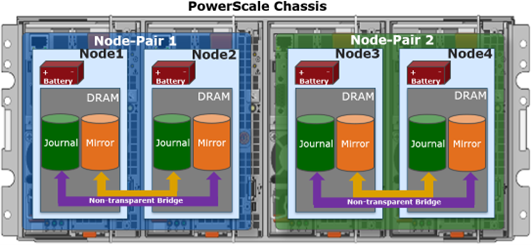
Nodes are paired for resilience and durability, with each pair sharing a mirrored journal and two power supplies:
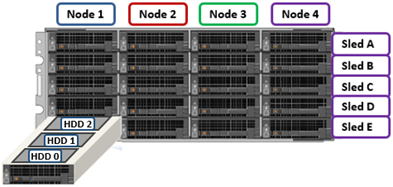
Storage-wise, each of the four nodes within a PowerScale A310/0 chassis’ has five associated drive containers, or sleds. These sleds occupy bays in the front of each chassis, with a node’s drive sleds stacked vertically. For example:
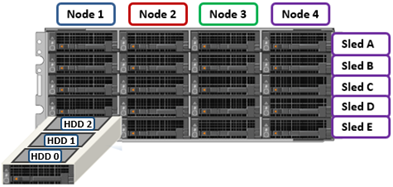
Nodes are numbered 1 through 4, left to right looking at the front of the chassis, while the drive sleds are labeled A through E, with A at the top.
The drive sled is the tray which slides into the front of the chassis. Within each sled, the 3.5” SAS hard drives it contains are numbered sequentially starting from drive zero, which is the HDD adjacent the airdam.
Each bay in a drive sled has a yellow ‘drive fault’ LED associated with each drive:

Even when a sled is removed from its chassis and its power source, these fault LEDs will remain active for 10+ minutes. LED viewing holes are also provided so the sled’s top cover does not need to be removed.
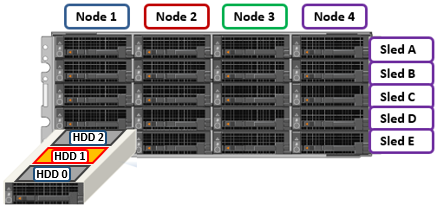
The A3100’s 42.2 inch chassis accommodates four HDDs per sled, compared to three drives for the standard (36.7 inch) depth A310 shown above. As such, the A3100 requires a deep rack, such as the Dell Titan cabinet whereas the A310 can reside in a regular 17” data center cabinet.
The A310 and A3100 platforms support a range of HDD capacities, currently including 2TB, 4, 8, 12, 16, 20, and 24TB capacities, and both regular ISE (instant secure erase) or self-encrypting drive (SED) formats.
A node’s drive details can be queried with OneFS CLI utilities such as ‘isi_radish’ and ‘isi_drivenum’. For example, the command output from an A3100 node:
# isi_drivenum Bay 1 Unit 6 Lnum 20 Active SN:GXNG0X800253 /dev/da1 Bay 2 Unit 7 Lnum 21 Active SN:GXNG0X800263 /dev/da2 Bay A0 Unit 19 Lnum 16 Active SN:ZRT1A5JR /dev/da6 Bay A1 Unit 18 Lnum 17 Active SN:ZRT1A4SE /dev/da5 Bay A2 Unit 17 Lnum 18 Active SN:ZRT1A42D /dev/da4 Bay A3 Unit 16 Lnum 19 Active SN:ZRT19494 /dev/da3 Bay B0 Unit 25 Lnum 12 Active SN:ZRT18NEY /dev/da10 Bay B1 Unit 24 Lnum 13 Active SN:ZRT1FJCJ /dev/da9 Bay B2 Unit 23 Lnum 14 Active SN:ZRT18N7F /dev/da8 Bay B3 Unit 22 Lnum 15 Active SN:ZRT1FDJL /dev/da7 Bay C0 Unit 31 Lnum 8 Active SN:ZRT1FJ0T /dev/da14 Bay C1 Unit 30 Lnum 9 Active SN:ZRT1F6BF /dev/da13 Bay C2 Unit 29 Lnum 10 Active SN:ZRT1FJMS /dev/da12 Bay C3 Unit 28 Lnum 11 Active SN:ZRT18NE6 /dev/da11 Bay D0 Unit 37 Lnum 4 Active SN:ZRT18N9P /dev/da18 Bay D1 Unit 36 Lnum 5 Active SN:ZRT18N8V /dev/da17 Bay D2 Unit 35 Lnum 6 Active SN:ZRT18NBE /dev/da16 Bay D3 Unit 34 Lnum 7 Active SN:ZRT1FR62 /dev/da15 Bay E0 Unit 43 Lnum 0 Active SN:ZRT1FDJ4 /dev/da22 Bay E1 Unit 42 Lnum 1 Active SN:ZRT1FR86 /dev/da21 Bay E2 Unit 41 Lnum 2 Active SN:ZRT1EJ4H /dev/da20 Bay E3 Unit 40 Lnum 3 Active SN:ZRT1E9MS /dev/da19
The first two lines of output about (bays 1 & 2) reference the cache SSD drives, contained withing the compute modules. The remaining ‘bay’ locations indicate both the sled (A to E) and drive (0 to 3). The presence above of four HDDs per sled (ie. bay numbers 0 to 3) indicate this is an A3100 node, rather than an A310 with only three HDDs per sled.
With regard to the nodes’ internal drives, the boot disk reservation size has increased to 18GB on these new platforms from 8GB on the previous generation. Plus partition sizes have also been expanded on these new platforms in OneFS 9.11, as follows:
| Partition | A310 / A3100 | A300 / A3000 |
| hw | 1GB | 500MB |
| journal backup | 8197MB | 8GB |
| kerneldump | 5GB | 2GB |
| keystore | 64MB | 64MB |
| root | 4GB | 2GB |
| var | 4GB | 2GB |
| var-crash | 7GB | 3GB |
The PowerScale A310 and A3100 platforms are available in the following networking configurations, with a 10/25Gb Ethernet front-end and either Ethernet or Infiniband back-end:
| Model | A310 | A3100 |
| Front-end network | 10/25 GigE | 10/25 GigE |
| Back-end network | 10/25 GigE, Infiniband | 10/25 GigE, Infiniband |
These NICs and their PCI bus addresses can be determined via the ’pciconf’ CLI command, as follows:
# pciconf -l | grep mlx mlx5_core0@pci0:16:0:0: class=0x020000 card=0x002015b3 chip=0x101f15b3 rev=0x00 hdr=0x00 mlx5_core1@pci0:16:0:1: class=0x020000 card=0x002015b3 chip=0x101f15b3 rev=0x00 hdr=0x00 mlx5_core2@pci0:65:0:0: class=0x020000 card=0x002015b3 chip=0x101f15b3 rev=0x00 hdr=0x00 mlx5_core3@pci0:65:0:1: class=0x020000 card=0x002015b3 chip=0x101f15b3 rev=0x00 hdr=0x00
Similarly, the NIC hardware details and drive firmware versions can be viewed as follows:
# mlxfwmanager Querying Mellanox devices firmware ... Device #1: ---------- Device Type: ConnectX6LX Part Number: 06XJXK_0R5WK9_Ax Description: NVIDIA ConnectX-6 LX Dual Port 25 GbE SFP Network Adapter PSID: DEL0000000031 PCI Device Name: pci0:16:0:0 Base GUID: 58a2e10300e22a24 Base MAC: 58a2e1e22a24 Versions: Current Available FW 26.36.1010 N/A PXE 3.6.0901 N/A UEFI 14.29.0014 N/A Status: No matching image found Device #2: ---------- Device Type: ConnectX6LX Part Number: 06XJXK_0R5WK9_Ax Description: NVIDIA ConnectX-6 LX Dual Port 25 GbE SFP Network Adapter PSID: DEL0000000031 PCI Device Name: pci0:65:0:0 Base GUID: 58a2e10300e22bf4 Base MAC: 58a2e1e22bf4 Versions: Current Available FW 26.36.1010 N/A PXE 3.6.0901 N/A UEFI 14.29.0014 N/A Status: No matching image found
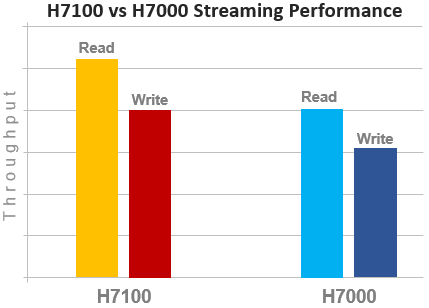
Compared to their A30x predecessors, the A310 and A3100 see a number of generational hardware upgrades. These include an shift to DDR5 memory, Sapphire Rapids CPU, and an up-spec’d power supply.
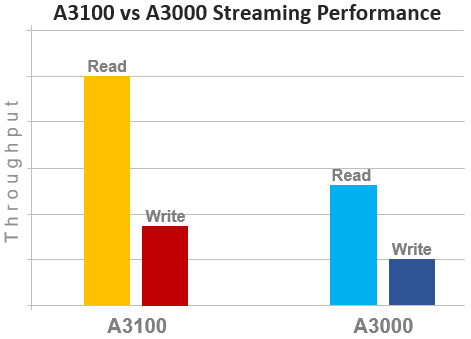
In terms of performance, the new A31x nodes provide a significant increase over the prior generation, as shown in the following streaming read and writes comparison chart for the A3100 and A3000:
OneFS node compatibility provides the ability to have similar node types and generations within the same node pool. In OneFS 9.11 and later, compatibility between the A310 and A3100 nodes and the previous generation platform is supported. Specifically, this node pool compatibility includes:
| OneFS Node Pool Compatibility | Gen6 | MLK | New |
| A200 | A300/L | A310/L | |
| A2000 | A3000/L | A3100/L | |
| H400 | A300 | A310 |
Node pool compatibility checking includes drive capacities, including for both data HDDs and SSD cache. This pool compatibility permits the addition of A310 node pairs to an existing node pool comprising four of more A300s if desired, rather than creating a A310 new node pool. Plus a similar compatibility for A3100/A3000 nodes.
Note that, while the A31x is node pool compatible with the A30x, the A31x nodes are effectively throttled to match the performance envelope of the A30x nodes. Regarding storage efficiency, support for OneFS inline data reduction on mixed A-series diskpools is as follows:
| Gen6 | MLK | New | Data Reduction Enabled |
| A200 | A300/L | A310/L | False |
| A2000 | A3000/L | A3100/L | False |
| H400 | A300 | A310 | False |
| A200 | – | A310 | False |
| – | A300 | A310 | True |
| H400 | – | A310 | False |
| A2000 | – | A3100 | False |
| – | A3000 | A3100 | True |
To summarize, in combination with OneFS 9.11, these new PowerScale hybrid A31x platforms deliver a compelling value proposition in terms of efficiency, density, flexibility, scalability, and affordability.